
Unité de taux gyroscopique - Gyro rate unit
L'unité de vitesse gyroscopique fait référence à un ordinateur de contrôle de tir développé par la Royal Navy du Royaume-Uni en 1937 et qui a été largement utilisé sur les navires de guerre britanniques pendant la Seconde Guerre mondiale . Dans les années 1930 , la Royal Navy a commencé à étudier la possibilité de combiner gyroscopes avec viseurs optiques pour mesurer directement et avec précision la vitesse de l' avion cible et la direction et a commencé le développement du GRU en 1937.A gyroscopique était attaché, par l' intermédiaire d'une liaison mécanique, à une optique monoculaire vue pour former l' unité de taux gyroscopique ou GRU.
Les gyroscopes, lorsqu'ils tournent, gardent leurs axes de rotation pointés dans une direction donnée s'ils ne sont pas perturbés. Le principe de base du GRU était que, comme le réticule du viseur optique était maintenu centré sur l'aéronef cible en mouvement, la liaison mécanique tirerait le gyroscope dans la direction du mouvement de l'aéronef. La force requise pour déplacer le gyroscope est proportionnelle au mouvement observé de la cible sur la ligne de visée. Cette force a été mesurée par la déflexion d'un dispositif à ressort et la mesure de la déflexion a été combinée avec un télémètre et / ou une distance et une altitude de cible mesurées par radar dans un ordinateur spécialisé, le boîtier d'unité de vitesse gyroscopique (GRUB).
Histoire
La Royal Navy, après la Première Guerre mondiale, est devenue de plus en plus préoccupée par la menace posée par les attaques aériennes. En 1930, la RN commença à équiper les navires du High Angle Control System , un système de contrôle de tir anti-aérien non tachymétrique , qui calculait les ordres de pose des canons et le réglage de l'heure de la fusée des canons anti-aériens , pour atteindre la cible. Les repères HACS I à IV dépendaient de la saisie par l'officier de contrôle dans l'ordinateur de la direction et de la vitesse estimées de l'aéronef, combinées à la mesure de la distance et de la hauteur à partir d'un télémètre optique à coïncidence pour permettre à l'ordinateur de former une solution. L'officier de contrôle estimait la vitesse cible en fonction du type d'aéronef, tandis que la direction de la cible ne pouvait être mesurée que grossièrement en alignant le réticule de ses jumelles avec le fuselage de l'aéronef. Malheureusement, ces estimations de la vitesse et de la direction de la cible étaient souvent erronées, et il a fallu du temps au HACS pour corriger ces estimations grâce à une boucle de rétroaction du directeur à l'ordinateur, retardant ainsi la génération d'une solution de contrôle de tir correcte et réduisant la précision. des coups de feu qui en résultent. Dans les années 1930, la Royal Navy a commencé à étudier la possibilité de combiner des gyroscopes avec des viseurs optiques pour mesurer directement et avec précision la vitesse et la direction de l'avion cible et a commencé le développement du GRU en 1937.

La boîte d'unité de taux gyroscopique
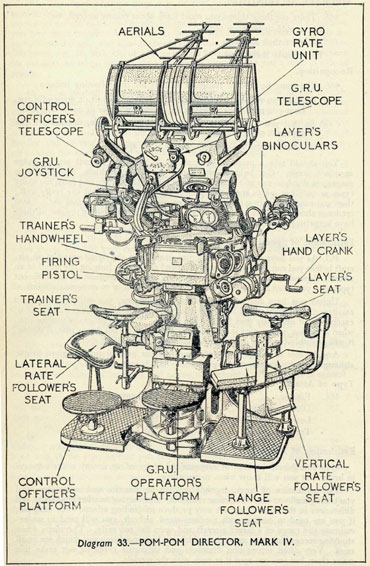
La boîte d'unité de vitesse gyroscopique a utilisé le mouvement, la portée et la hauteur de la cible mesurés pour déterminer avec précision la direction réelle du mouvement de la cible, y compris son taux de changement d'altitude, et a transmis ces informations à l'ordinateur HACS, qui a ensuite généré les ordres de pose des armes à feu. et le réglage correct de la fusée horaire. L'ordinateur HACS ne pouvait pas utiliser directement les informations sur le taux de changement d'altitude, de sorte que le GRUB calculerait l'altitude cible, la direction et la vitesse apparente pendant un court intervalle de temps, égal au cycle de chargement des canons, avant l'heure réelle et l'alimentation. ceci à l'ordinateur HACS lui permettant de générer des ordres corrects de mise à feu et de réglage de la fusée. Le GRUB a ainsi converti le HACS en un système de contrôle de tir tachymétrique . Le GRU et le GRUB ont commencé à apparaître sur les navires RN en 1940. Le GRU / GRUB pouvait calculer la vitesse et la direction de la cible pour des cibles avec une vitesse maximale de 360 nœuds, ou 6 degrés de mouvement de la cible par seconde et était plus précis à des distances plus courtes où le mouvement apparent de la cible était le plus élevé. GRU / GRUB a également été utilisé sur le Pom-Pom Director , Mark IV, et avec le Fuze Keeping Clock .
Voir également
Notes et références
Liens externes
- Le directeur du Pom-Pom, Mark IV dans The Gunnery Pocket Book , BR 224/45, 1945 mis en ligne avec l'aimable autorisation de la Historic Naval Ships Association
- Illustration du directeur du Pom-Pom, Mark IV dans The Gunnery Pocket Book , BR 224/45, 1945, mise en ligne avec l'aimable autorisation de la Historic Naval Ships Association
- ORDINATEURS DE GUNNERY MÉCANIQUE BRITANNIQUE DE LA SECONDE GUERRE MONDIALE
{kind=link}